| Napęd magnetyczny i inercyjny |
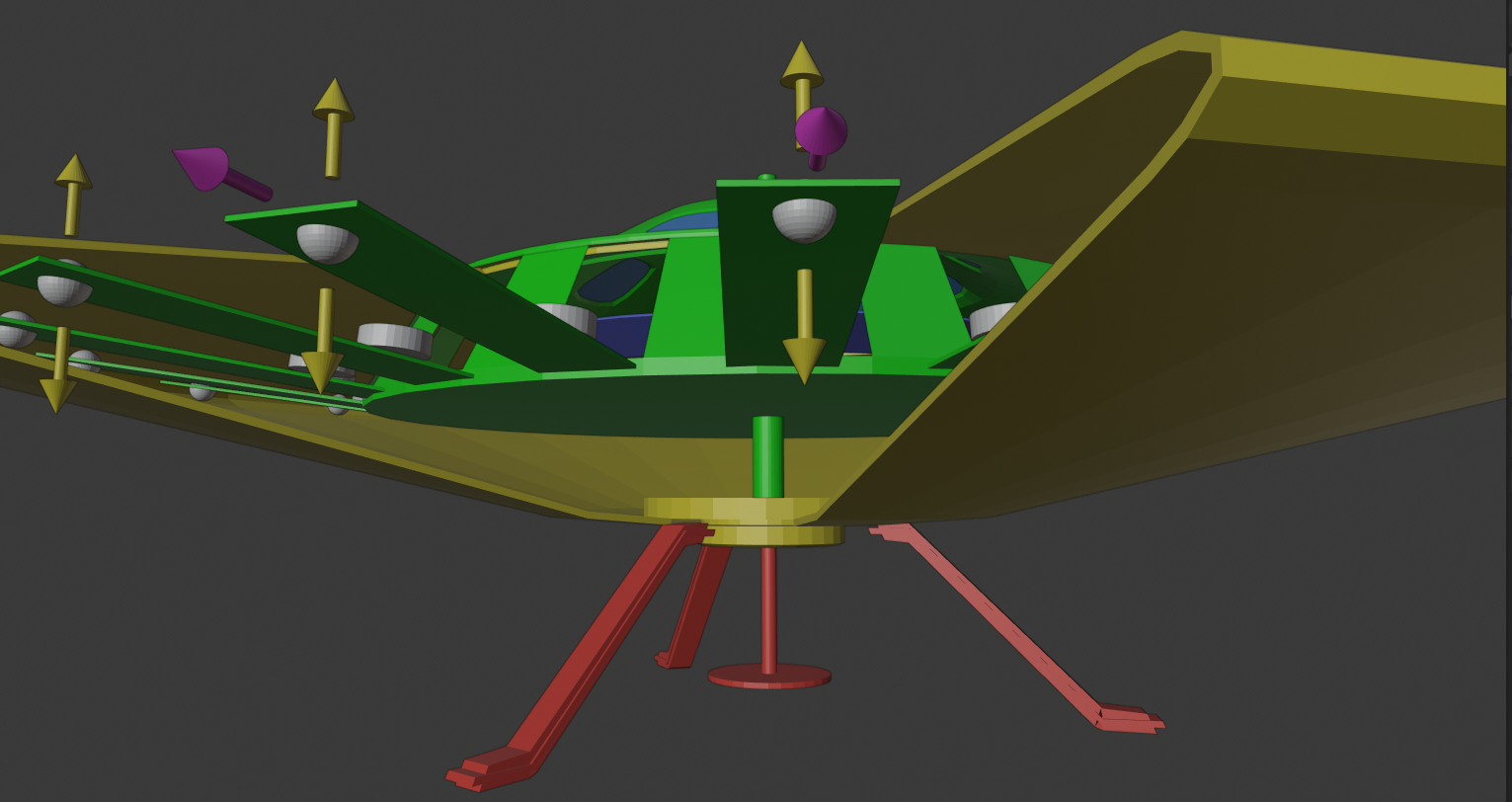
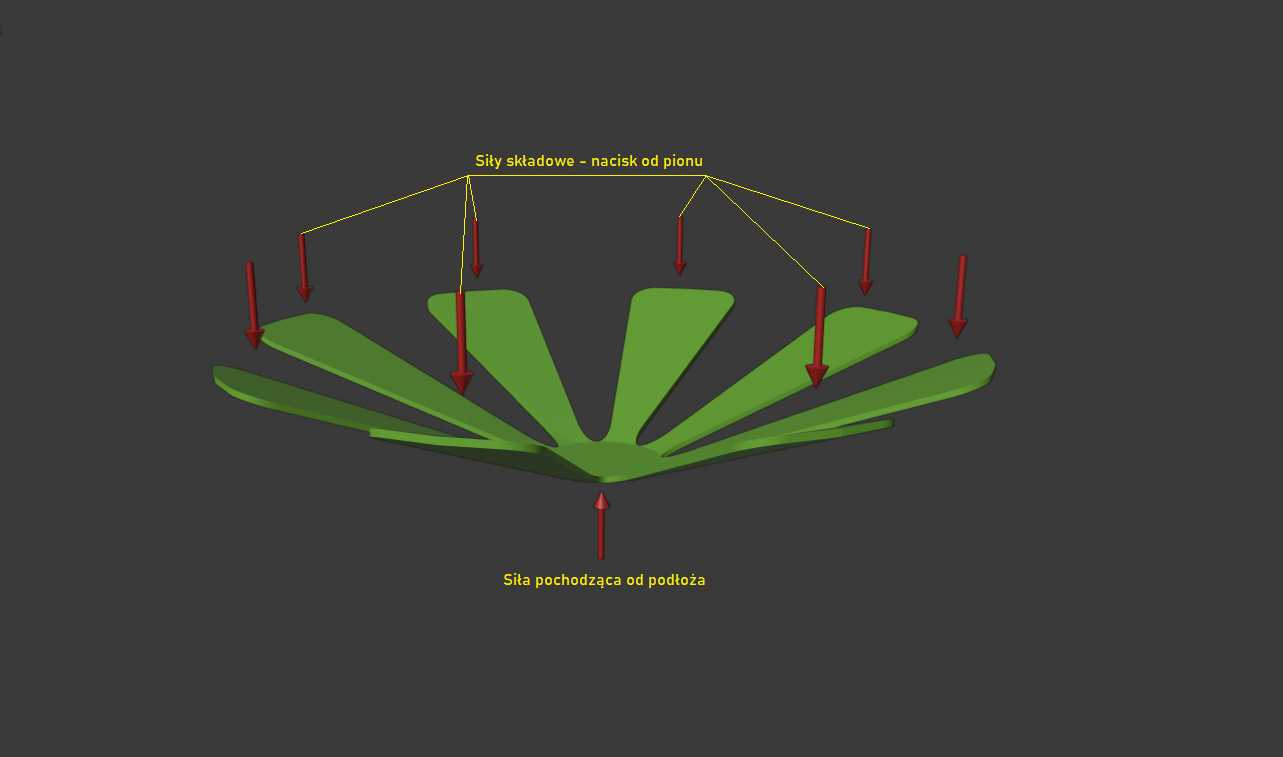
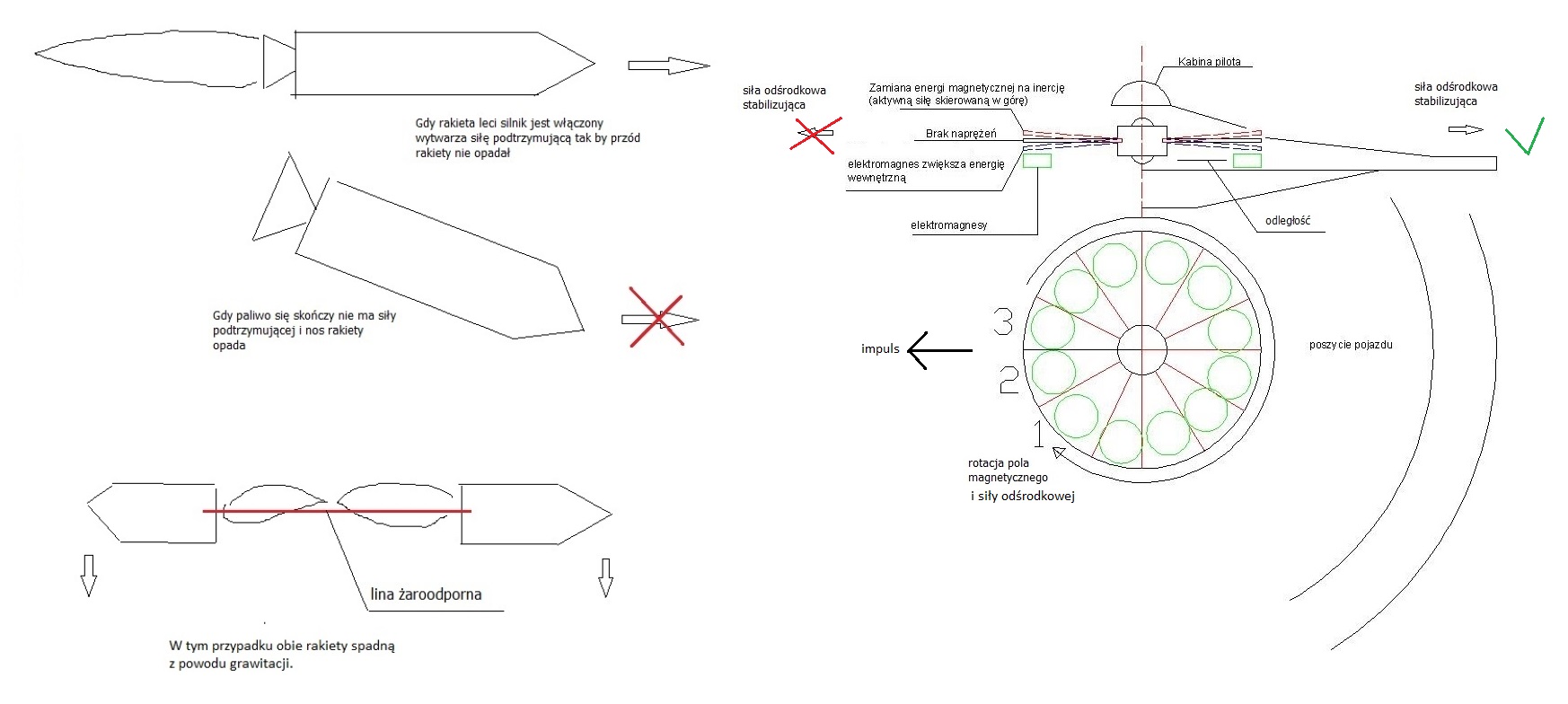
Napęd poniższy wykorzystuje siły odśrodkowe działające na ruchome elementy konstrukcyjne, które są upoziomowane i załączane tak by wytworzyć wir złożony z sił odśrodkowych. Główny napęd uzyskuje się w tym przypadku z siły Lorentza z cewek w polu magnetycznym okalających cały system napędowy. Poziome elementy nośne powinny być skierowane końcami nieco w górę i powinny wytwarzać siłę potrzebną do przeciwdziałania grawitacji pochodzącej od mas obiektów jak planety czy ksieżyce. Start pionowy polegać miałby na przygotowaniu systemu poprzez drgające elementy poziome do działania cewki magnetycznej zanurzonej w polu magnesów stałych lub elektromagnesów o dużej sile magnetycznej. Poziome elementy wsporcze powinny działać w ten sposób by siła odśrodkowa ciągnęła je w kierunku na zewnątrz pojazdu tj. po jego obwodzie, gdyż pojazd ma mieć kształt dysku lub spodka. Teoretycznie pojazd mógłby działać w oparciu o samą siłę odśrodkową jednak wtedy elementy ruchome musiałyby być ustawione pod większym kątem do poziomu, co przeszkadzałoby w uzyskaniu kształtu spodka i całość mogłaby być mniej aerodynamiczna. Należałoby zastanowić się, czy elementy oscylujące powinny działać jednocześnie i synchronicznie czy sekwencyjnie, ponieważ może to być problemem o podstawowym znaczeniu dla działania mechanizmu napędowego tego typu pojazdów czy urządzeń opartych o podobne zjawiska fizyczne. Elementy oscylujące narożone byłyby na zniszczenie poprzez zmęczenie materiału więc powinny byc wykonane z materiału o jak najmniejszej pamięci odkształceń jak np.stal irydowana lub podobna. Sam mechanizm magnetyczny napędu oscylacji elementów oscylujących może polegac na wykorzystaniu elektromagnesów umieszczonych jak najbliżej powierzchni z zachowaniem przerwy niezbednej. Drgania nie mogą przekroczyć pewnej wartości krytycznej poza którą system napędu uległby zniszczeniu ani wzmacniać się rezonansowo skutkiem czego groziłaby utrata kontroli nad tym systemem. Należy obliczyć jaki moduł powinny posiadać elementy drgające tak by częstotliwość drgań i amplituda, od których to właśnie wartości zależy bezpośrednio generowana siła odśrodkowa, były optymalne. Należy dopasować najważniejszy parametr elementu nośnego a mianowicie jego przekrój poprzeczny jak również długość podstawową. Prawdopodobnie elektromagnesy powinny byc zamontowane na szynach tak żeby można sterować ich położeniem w trakcie pracy mechanizmu napędowego tj. powinna być możliwość regulacji ich położenia pod elementami drgającymi wzduż większej części ich długości. Prawdopodnie kąt pochylenia do poziomu elementów drgających powinien wachać się granicach 15 do 30 stopni. Przy czym prawidłowość byłaby taka, że im większy kąt pochylenia w stosunku do poziomu tym stabilizacja pojazdu zmniejsza się, gradient siły pionowej jednak rośnie równocześnie. Ten system napędu stabilizowany może byc dodatkowo żyroskopem, jednak powinien on stabilizować się automatycznie na wyższych obrotach, co jest zależne właśnie od kąta pochylenia elementów drgających. System wymaga znacznej precyzji by dostroić współgranie wszystkich elementów w mechanizmie napędowym. Nie jest to prosty w konstrukcji system napędu pojazdu kosmicznego jako takiego, jednak zdaje się, że jest to system prawdopodbny rzeczowo jeżeli chodzi o wiarygodność działania i podstawy teoretyczne. Jest to system napędu mechanicznego i magnetycznego oraz zaawansowanego sterowania elektronicznego i nie będzie tani, jeżeli ktoś podejmie próbę jego realizacji. Jeżeli chodzi o wysokość zamieszczenia mechanizmu napędowego to im wyższy tym masa pojazdu bliższa powierzchni ziemi działa bardziej stabilizująco, po prostu ta masa będzie ciążyc pod pojazdem, a skutek będzie taki że pojazd będzie stabilizował się w osi pionowej. W przestrzeni kosmicznej jednak właśnie ta masa może działać jak koło zamachowe i sprawiać trudności w opanowaniu sztuki pilotażu zwłaszcza przy manewrach ciasnego skręcania lub zawracania. Należałoby zastanowić się jednak do jakiej wysokości maksymalnie stosować tę zależność. Należało by znależć odpowiedź eksperymentalnie, ale wiadomo, że eksperymentowanie nie zawsze jest uzasadnione ekonomicznie i może być kosztowne szczególnie przy tego rodzaju projektach. Manewry w kosmosie tego typu pojazdem polegałyby na wykorzystaniu cewki - hamowanie i przyspieszanie, manewry boczne były by mozliwe poprzez asymetryczne przekierowanie mocy do oscylatorów. Do celów skuteczniejszego hamowania można by także pomyśleć nad programowalnym systemem zmiany odchylenia oscylatorów do pozycji wstecznej, działałyby one wtedy przeciwnie jak w fazie standardowej, umożliwiając skuteczniejsze hamowanie czy manewry skręcania czy jakiejkolwiek innej zmiany trajektorii lotu.
| Napęd magnetyczny inercyjny |


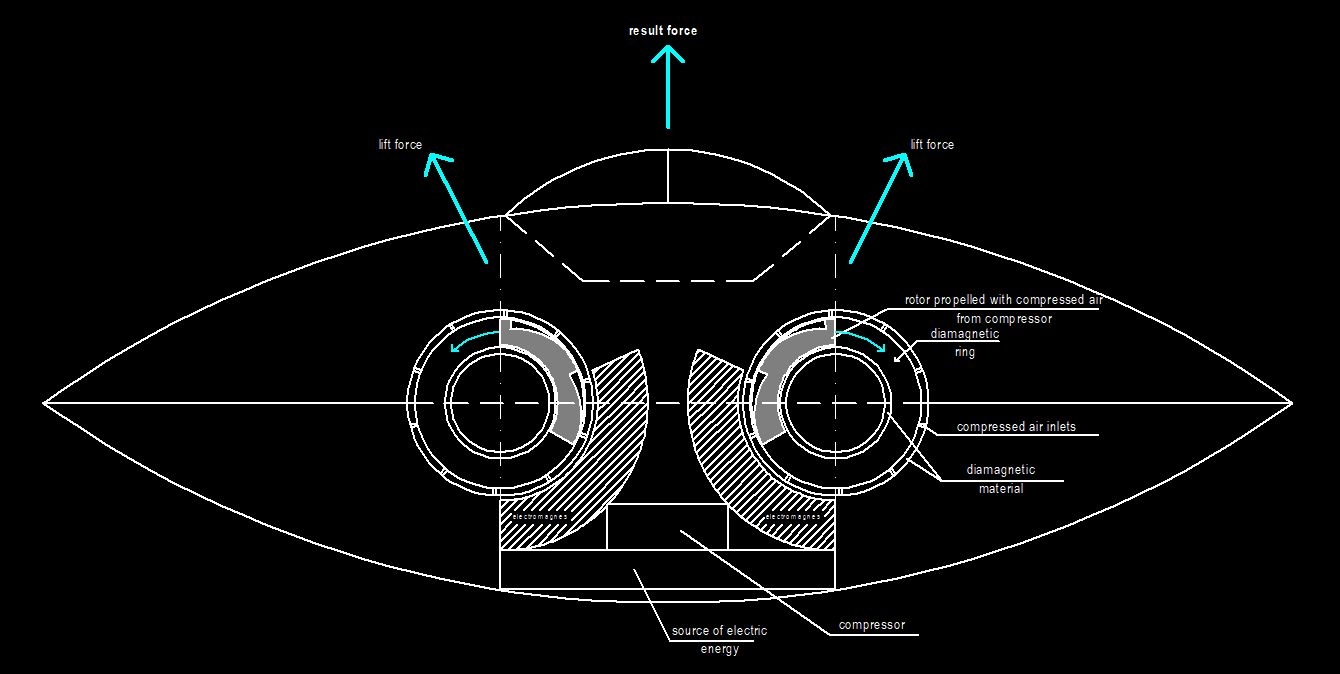
| Przykładowy typ ziemskiej konstrukcji |
Napęd poniższy wykorzystuje siły magnetyczne działające pomiędzy obracającym się wirnikiem stalowym, a elektromagnesem. Wirnik stalowy napędzany jest sprężonym powietrzem. Za każdym razem gdy wirnik przechodzi przed elektromagnesem następuje hamowanie rotacji wirnika i przy opuszczaniu strefy pola magnetycznego powstają siły dynamiczne zdolne teoretycznie do napędu tego typu pojazdu.

Naszej cywilizacji potrzeba innej technologii, by zdobyć klucz do zasobów innych planet w systemie słonecznym. Przy obecnym zaawansowaniu i metodach technologicznych nie można w sposób wydatny i konsekwentny zrealizować szerzej zakrojonego planu eksploatacji systemu słonecznego. Obecna technologia nie nadaje się do kompleksowej kolonizacji innych planet typu Marsa czy Wenus, gdyż koszty są zbyt wysokie. Inna technologia zdolna sprostać wymaganiom jednak pociąga za sobą opracowanie zupełnie odmiennych realiów technologicznych i naukowych w oderwaniu od kanonów, które już znamy. To co jest pozytywne to to że mamy już część niezbędnej technologii, opanowaliśmy technologię nuklearną już w dostatecznej mierze, do tego, by teraz uczynić kolejny krok. Sam problem odpowiedniego napędu może być sprawnie i szybko rozwiązany, jednak trzeba zwrócić się w kierunku zgoła innym od napędu odrzutowo - rakietowego, gdyż jest on nawet przy zastosowaniu technologii jądrowego napędu wodorowego zbyt mało wydajny i również niezbyt bezpieczny dla człowieka. Istotnym kierunkiem zdaje się jawić obecnie technologia oparta na mechanice ciała stałego i uzyskiwanych w ten sposób efektach bezwładnościowych i grawitacyjnych, na tym być może powinniśmy się obecnie skupić.
| Propozycja napędu za pośrednictwem sił odśrodkowych. |